引言:
搬运机器人系列是基于自动化技术的智能(néng)搬运设备,通过搬运和移动货物(wù),為(wèi)生产和物(wù)流环节提供高效、低成本的解决方案。在搬运机器人的设计中,设计师需要注重其设计理(lǐ)念、需求和创新(xīn)解决方案,以满足不断变化的用(yòng)户需求并推动其持续进化。
:拓宽自动化搬运的边界(图1)")
1.设计理(lǐ)念:智能(néng)、灵活、安全
搬运机器人的设计理(lǐ)念是基于智能(néng)化、灵活性和安全性。首先,智能(néng)化要求机器人具备自主决策和學(xué)习能(néng)力,能(néng)够根据环境变化和任務(wù)需求主动作出正确决策。其次,灵活性要求机器人能(néng)够适应不同工作场景和货物(wù)搬运需求,处理(lǐ)各种形状、尺寸和重量的物(wù)品。最后,安全性是设计的核心要素,机器人需要具备高度安全性,避免与人员和其他(tā)设备发生碰撞,确保工作场所的安全运行。
:拓宽自动化搬运的边界(图2)")
2.设计需求:提高效率、降低成本
在搬运机器人的设计中,提高效率和降低成本是主要的设计需求。高效率可(kě)以通过优化机器人的搬运算法、路径规划和动态调度等手段实现,以达到更快、更准确的搬运速度。降低成本可(kě)以通过采用(yòng)经济实惠的材料和组件、提高机器人的可(kě)维护性和可(kě)扩展性来实现。此外,设计师还需要考虑机器人的能(néng)耗,减少能(néng)源消耗,进一步降低成本。
:拓宽自动化搬运的边界(图3)")
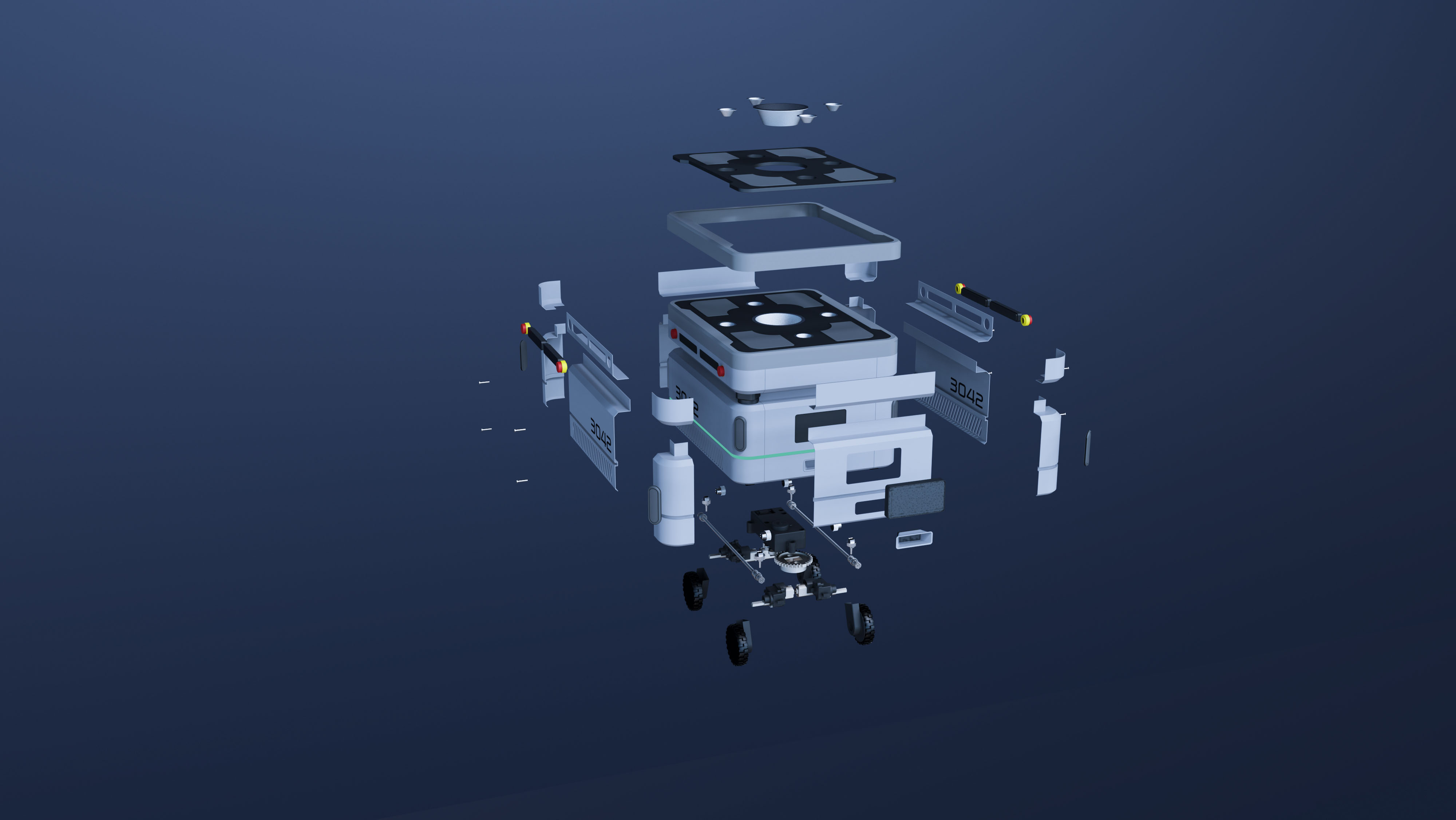
3.创新(xīn)解决方案:多(duō)轮式搬运机器人、自动化交互等
為(wèi)了满足搬运机器人的设计需求,设计师可(kě)以采用(yòng)多(duō)种创新(xīn)解决方案。其中之一是多(duō)轮式搬运机器人,它采用(yòng)了多(duō)轮设计,可(kě)以在不同地形上灵活移动和搬运货物(wù)。这种设计方案提高了机器人的适应性和稳定性,使其能(néng)够在各种复杂的工作环境中进行搬运任務(wù)。
另一个创新(xīn)解决方案是自动化交互技术。搬运机器人可(kě)以与其他(tā)自动化设备、传感器和控制系统实现无缝交互。通过自动化交互,机器人可(kě)以更好地与其他(tā)设备协同工作,提高整體(tǐ)搬运效率和准确性。例如,机器人可(kě)以通过传感器获取周围环境的信息,并根据实时数据进行路径规划和障碍物(wù)避让。
同时,创新(xīn)的解决方案还可(kě)以包括使用(yòng)机器视觉和人工智能(néng)技术。机器视觉技术可(kě)以使机器人能(néng)够识别和定位货物(wù),从而更准确地进行搬运操作。人工智能(néng)技术则可(kě)以赋予机器人更强大的學(xué)习和决策能(néng)力,使其能(néng)够根据不同场景和任務(wù)要求做出智能(néng)决策,提高搬运的效率和灵活性。
需要注意的是,创新(xīn)解决方案在设计中的应用(yòng)需要综合考虑诸多(duō)因素,如成本、可(kě)行性和用(yòng)户需求等。设计师应该密切关注技术发展的趋势,与相关领域的专家和研究人员进行深入合作,以共同探索出更具创新(xīn)性的解决方案。通过不断引入新(xīn)技术和理(lǐ)念,搬运机器人系列的设计将不断向前发展,进一步推动自动化搬运的边界拓宽。
:拓宽自动化搬运的边界(图4)")
4.设计挑战:人机交互、安全性和可(kě)靠性
在搬运机器人系列的设计过程中,设计师面临着一些挑战。首先是人机交互的挑战,机器人与人类之间的协作需求不断增加。因此,设计师需要考虑如何使机器人的操作界面更加友好、直观,以方便用(yòng)户与机器人进行交互和控制。
其次是安全性的挑战,尤其是在与人类共同工作的环境中。机器人需要能(néng)够实时感知和避免碰撞,并采取安全措施来保护人员免受伤害。设计师需要充分(fēn)考虑机器人的传感器技术、障碍物(wù)检测和安全防护装置等,提供可(kě)靠的安全性能(néng)。
另外,机器人的可(kě)靠性也是设计的重要考虑因素。机器人在不同环境和工作条件下需要保持稳定和可(kě)靠的运行,以确保任務(wù)的顺利完成。设计师需要选择高质量的零部件和系统,并进行详尽的测试和验证,以确保机器人能(néng)够長(cháng)时间稳定地工作。
5.基于创新(xīn)的设计解决方案
為(wèi)了应对上述的设计挑战,本也的设计师可(kě)以采取一系列创新(xīn)的设计解决方案。例如,结合虚拟现实和增强现实技术,设计人性化的用(yòng)户界面,使操作人员能(néng)够更直观地与机器人进行交互。通过引入先进的机器學(xué)习和深度學(xué)习算法,使机器人能(néng)够自动學(xué)习和适应不同场景下的变化。
:拓宽自动化搬运的边界(图5)")
此外,引入先进的传感技术,如多(duō)种传感器的组合应用(yòng),提供更准确和全面的环境感知能(néng)力,保证机器人的安全性和避开障碍物(wù)。同时,使用(yòng)可(kě)靠的硬件组件和系统架构,进行充分(fēn)的测试和验证,确保机器人在各种工作条件下的稳定运行。
搬运机器人系列的设计需要解决人机交互、安全性和可(kě)靠性的挑战。通过创新(xīn)的设计解决方案,如人性化的用(yòng)户界面、先进的传感技术和可(kě)靠的硬件组件,设计师可(kě)以克服这些挑战并提供出色的搬运机器人系列设计。
本也的设计师一直再不断关注技术的发展,深入了解用(yòng)户需求并与用(yòng)户和研发团队紧密合作,以不断推动搬运机器人系列的设计创新(xīn)。通过合理(lǐ)运用(yòng)智能(néng)化技术、优化搬运算法和提升安全性能(néng)等方面的创新(xīn)工作,搬运机器人系列的设计有(yǒu)望在工业生产和物(wù)流领域实现更高效、更安全和更可(kě)靠的搬运过程。
:拓宽自动化搬运的边界(图6)")